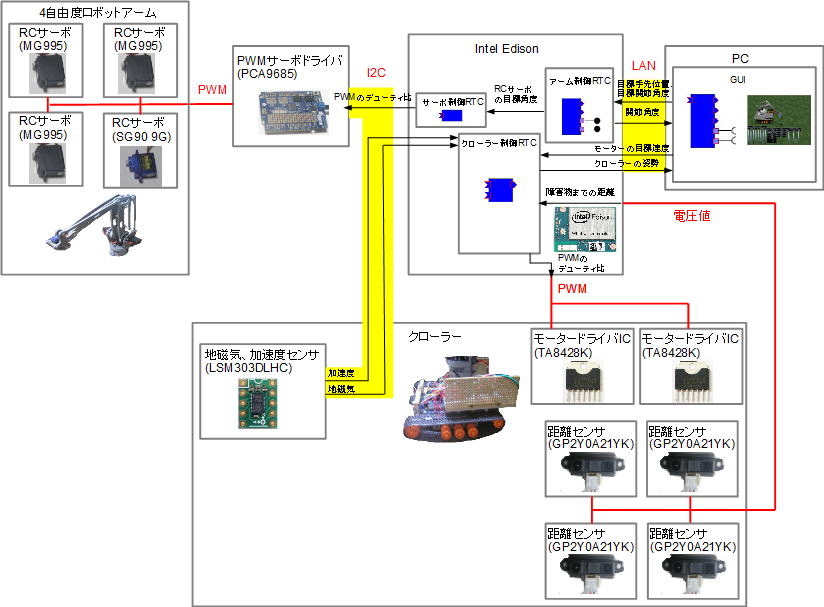
Edisonでアーム+クローラーを制御
アームの制御にクローラー制御RTC、クローラー制御の各デバイスを追加しています。
実機の構成
まずはアームを動作できるようにしておいてください。
まずは各ICと接続します。

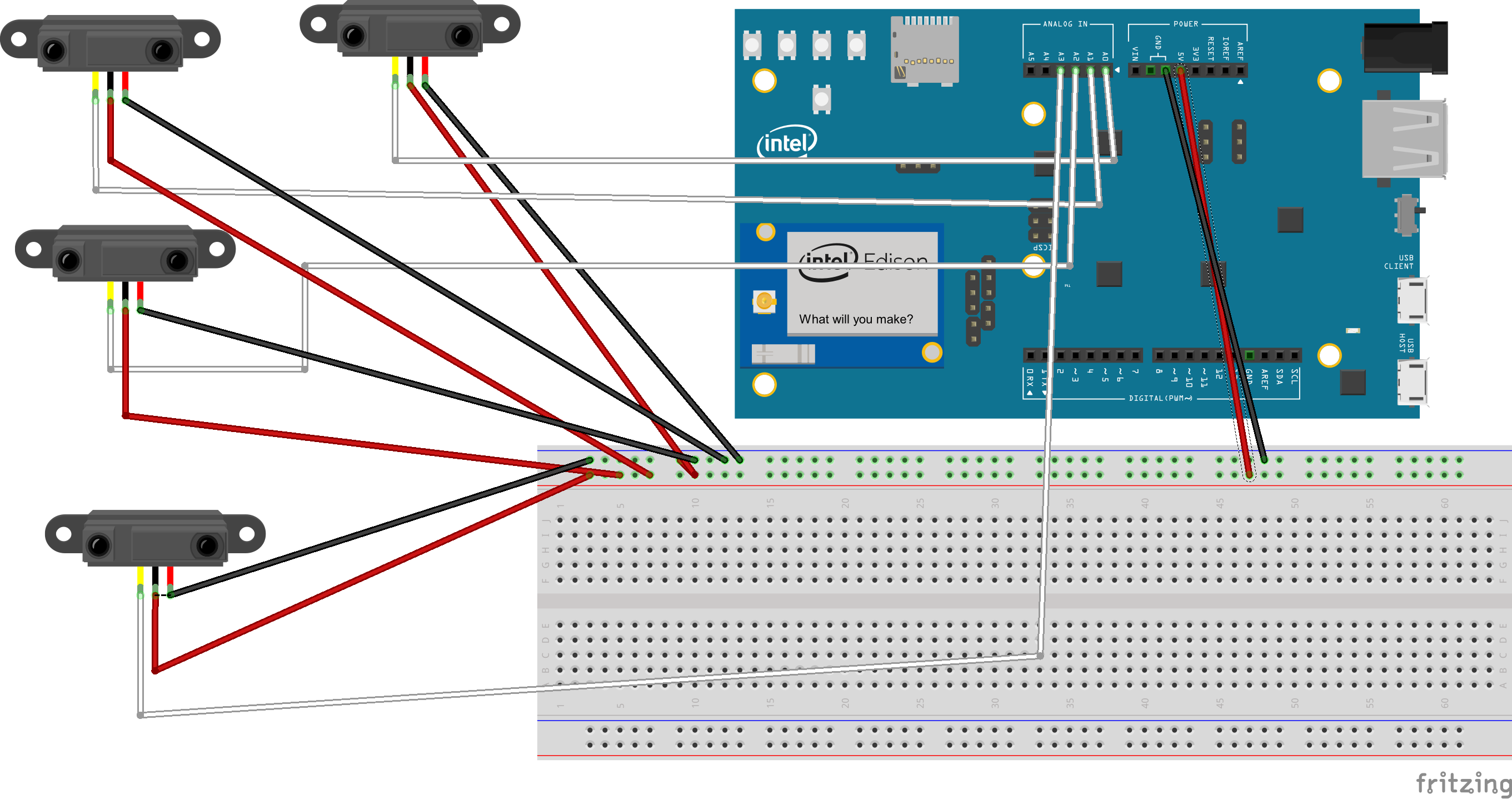
距離センサ
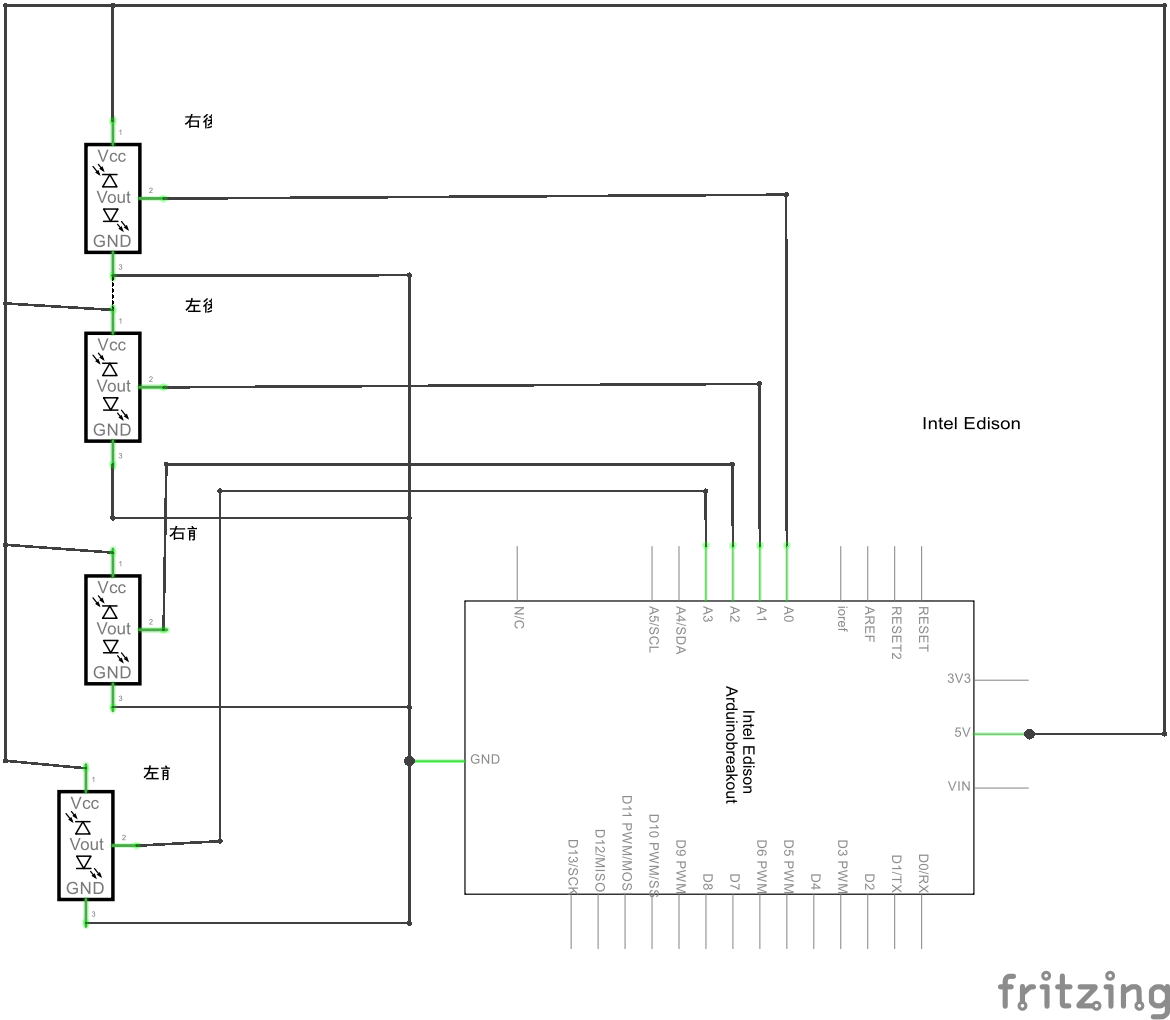
距離センサ(GP2Y0A21YK)を以下のように接続します。
GNDが赤、VDDが黒なので注意してください。
| 距離センサの設置場所 | 白 | 赤 | 黒 |
| 右前 | A2 | GND | 5V |
| 左前 | A3 | GND | 5V |
| 右後 | A0 | GND | 5V |
| 左後 | A1 | GND | 5V |
モータードライバIC
モータードライバIC(TA8428K)を以下のように接続します。電源はRCサーボ駆動用電源と同じ電源に接続してください。
| ピン番号 | 端子記号 | 左モーター制御用 | 右モーター制御用 |
| 1 | IN1 | Edison(3ピン) | Edison(6ピン) |
| 2 | IN2 | Edison(5ピン) | Edison(9ピン) |
| 3 | OUTA | 左モーター | 右モーター |
| 4 | GND | GND | GND |
| 5 | OUTA | 左モーター | 右モーター |
| 6 | N.C | ||
| 7 | Vcc | 別電源 | 別電源 |
クローラー
次にクローラーを組み立てます。
まずはシングルギヤボックス 4速タイプを2つ組み立ててライトダッシュモーターを取り付けてください。次に組み立てたシングルギアボックスをユニバーサルプレートL
210×160mmに取り付けてください。
次にトラック&ホイールセットをユニバーサルプレートLの両側に2つずつ取り付けてください。
動作確認
実機の構成が終了したら以下の手順で動作確認を行ってください。