依存ソフトウェアのインストール(Intel Edison)
まずはGUI起動側のPCでの作業を説明します。
ubilinux
ubilinuxのサイトから、
ubilinux-edison-ww44.5.tar.gz
をダウンロードして解凍してください。
ここからdfu-util.exeを入手してubilinuxを解凍したフォルダにコピーしてください。
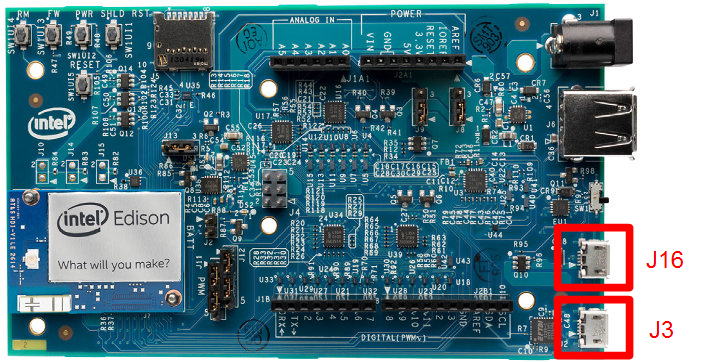
flashall.batを起動後、EdisonのJ16とPCをUSB-MicroUSB変換ケーブルで接続すればubilinuxを導入できます。
ここからはEdison上での作業を説明します。
まずはEdisonのJ3とPCを接続してTeraTermでシリアル接続してください。
転送速度は115200bpsに設定してください。
ユーザー名はroot、パスワードはEdisonでログインできます。
まずは無線LANで接続するために設定を行います。
このサイトを参考にして/etc/network/interfacesを編集してください。
無線LANは自動起動できたほうが便利なので、/etc/rc.localに以下の記述を追加してください。
/sbin/ifup wlan0
無線LANが利用できない場合、USB経由で通信する事もできます。このサイトを参考にしてください。
まずは必要なソフトウェアをapt-getでインストールします。
apt-get install sudo python-dev git cmake uuid-dev
SWIG
以下のコマンドを入力してください。
git clone https://github.com/swig/swig.git cd swig ./autogen.sh ./configure make sudo make install
MRAA
以下のコマンドを入力してください。
git clone https://github.com/intel-iot-devkit/mraa.git cd mraa mkdir build cd build cmake -DBUILDSWIGNODE=OFF .. make sudo make install
omniORB
以下のコマンドを入力してください。
wget http://sourceforge.net/projects/omniorb/files/omniORB/omniORB-4.1.7/omniORB-4.1.7.tar.bz2 tar -xf omniORB-4.1.7.tar.bz2 cd omniORB-4.1.7 mkdir build cd build ../configure make
omniORBpy
以下のコマンドを入力してください。wget http://sourceforge.net/projects/omniorb/files/omniORBpy/omniORBpy-3.7/omniORBpy-3.7.tar.bz2 tar -xf omniORBpy-3.7.tar.bz2 cd omniORBpy-3.7 mkdir build cd build ../configure make
OpenRTM-aist
以下のコマンドを入力してください。
wget http://www.openrtm.org/pub/OpenRTM-aist/cxx/1.1.1/OpenRTM-aist-1.1.1.tar.gz tar -xf OpenRTM-aist-1.1.1.tar.gz cd OpenRTM-aist-1.1.1 ./configure --without-doxygen make sudo make install
OpenRTM-aist-Python
以下のコマンドを入力してください。
wget http://www.openrtm.org/pub/OpenRTM-aist/python/1.1.0/OpenRTM-aist-Python-1.1.0-RELEASE.tar.gz tar -xf OpenRTM-aist-Python-1.1.0-RELEASE.tar.gz cd OpenRTM-aist-Python-1.1.0 python setup.py build sudo python setup.py install
rtshell
以下のコマンドを入力してください。
wget -O rtshell-4.0.0.tar.gz https://github.com/gbiggs/rtshell/archive/v4.0.0.tar.gz tar -xf rtshell-4.0.0.tar.gz cd rtshell-4.0.0 sudo python setup.py install
rtctree
以下のコマンドを入力してください。
wget -O rtctree-4.0.0.tar.gz https://github.com/gbiggs/rtctree/archive/v4.0.0.tar.gz tar -xf rtctree-4.0.0.tar.gz cd rtctree-4.0.0 sudo python setup.py install
rtsprofile
以下のコマンドを入力してください。
wget -O rtsprofile-4.0.0.tar.gz https://github.com/gbiggs/rtsprofile/archive/v4.0.0.tar.gz tar -xf rtsprofile-4.0.0.tar.gz cd rtsprofile-4.0.0 sudo python setup.py install
OpenRTM-aist関連のライブラリをインストールするコマンドをまとめたシェルスクリプトを作成したのでこれを使えば上記のコマンドを入力する必要はありません。
wget http://robotarmrtc.iaigiri.com/rtmInstaller.sh sh rtmInstaller.sh
以前のバージョンでのインストールの手順はこのページに記述してあります。