
クローラー制御複合コンポーネントの仕様
距離センサ、地磁気・加速度センサ等を搭載したクローラーロボットを制御するためのRTCを複合化したコンポーネントです。
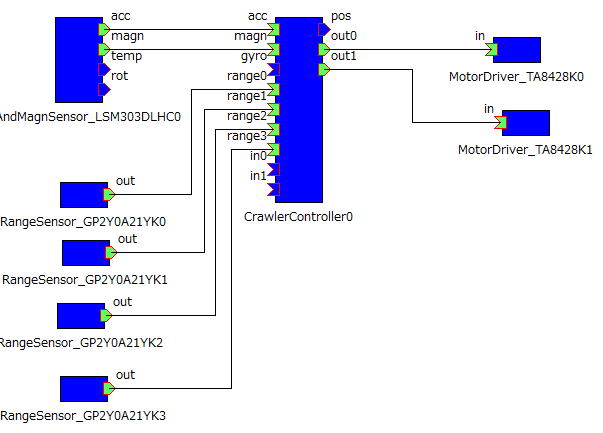
以下のRTCを複合化してあります。
内部は以下のように接続されています。
RTC名
Crawler
DataOutPort
| 名称 | データ型 | 説明 |
| mpos | RTC::TimedPose2D | センサ情報から計算した現在位置、姿勢(位置の計測は実装できていないので左右モーターの電圧が正の場合は前進、負の場合は後退するようにしてある) |
DataInPort
| 名称 | データ型 | 説明 |
| in0 | RTC::TimedDouble | 左モーターへ入力する電圧のPWMデューティー比 距離センサによる回避運動をする場合はこの入力値を補正する |
| in1 | RTC::TimedDouble | 右モーターへ入力する電圧のPWMデューティー比 距離センサによる回避運動をする場合はこの入力値を補正する |