
アーム制御複合コンポーネントの仕様
サインスマート製4自由度ロボットアームを制御するためのRTCを複合化したコンポーネントです。
以下のRTCを複合化してあります。
内部は以下のように接続されています。
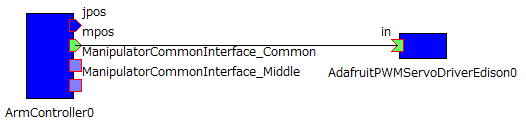
RTC名
RobotArmController
DataOutPort
| 名称 | データ型 | 説明 |
| jpos | RTC::TimedDoubleSeq | 目標関節角度 |
サービスポート
ManipulatorCommonInterface_Common
| 名称 | 方向 | IDLファイル | 説明 |
| ManipulatorCommonInterface_Common | Provided | ManipulatorCommonInterface_Common.idl | ロボットアーム共通コマンドです。 |
ManipulatorCommonInterface_Middle
| 名称 | 方向 | IDLファイル | 説明 |
| ManipulatorCommonInterface_Middle | Provided | ManipulatorCommonInterface_MiddleLevel.idl | ロボットアーム中レベルモーションコマンドです。 |