ロボットアーム制御RTCの仕様
サインスマート製4自由度ロボットアーム制御RTCです。 サービスポートで目標位置の指定等をすると現在位置からの軌道を計算し、そこから目標関節角速度を計算します。サーボが位置制御しかできず、関節角度を取得する手段もないため目標関節角速度を積分した値を目標関節角度にしています。
RTC名
ArmController
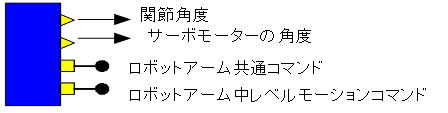
DataOutPort
| 名称 | データ型 | 説明 |
| jpos | RTC::TimedDoubleSeq | 目標関節角度 |
| mpos | RTC::Acceleration2D | モーターの目標角度 |
サービスポート
ManipulatorCommonInterface_Common
| 名称 | 方向 | IDLファイル | 説明 |
| ManipulatorCommonInterface_Common | Provided | ManipulatorCommonInterface_Common.idl | ロボットアーム共通コマンドです。 |
ManipulatorCommonInterface_Middle
| 名称 | 方向 | IDLファイル | 説明 |
| ManipulatorCommonInterface_Middle | Provided | ManipulatorCommonInterface_MiddleLevel.idl | ロボットアーム中レベルモーションコマンドです。 |
コンフィギュレーションパラメータ
| 名称 | 型 | デフォルト値 | 説明 |
| init_angle1 | double | 0 | 関節1の初期角度 |
| init_angle2 | double | 1.5 | 関節2の初期角度 |
| init_angle3 | double | -0.5 | 関節3の初期角度 |
| init_angle4 | double | 0 | 関節4の初期角度 |
| init_gripperPos | double | 0 | グリッパーの初期位置 |