
PWMサーボドライバー制御RTC
RCサーボへの目標角度をInPortから受信して、PCA9685搭載のデバイスにI2CでPWMのデューティー比を指令します。
例えば以下の製品で利用できます。
I2C接続16チャンネル12ビットPWMサーボシールド
PCA9685 16Channel 12bit PWM サーボドライバー
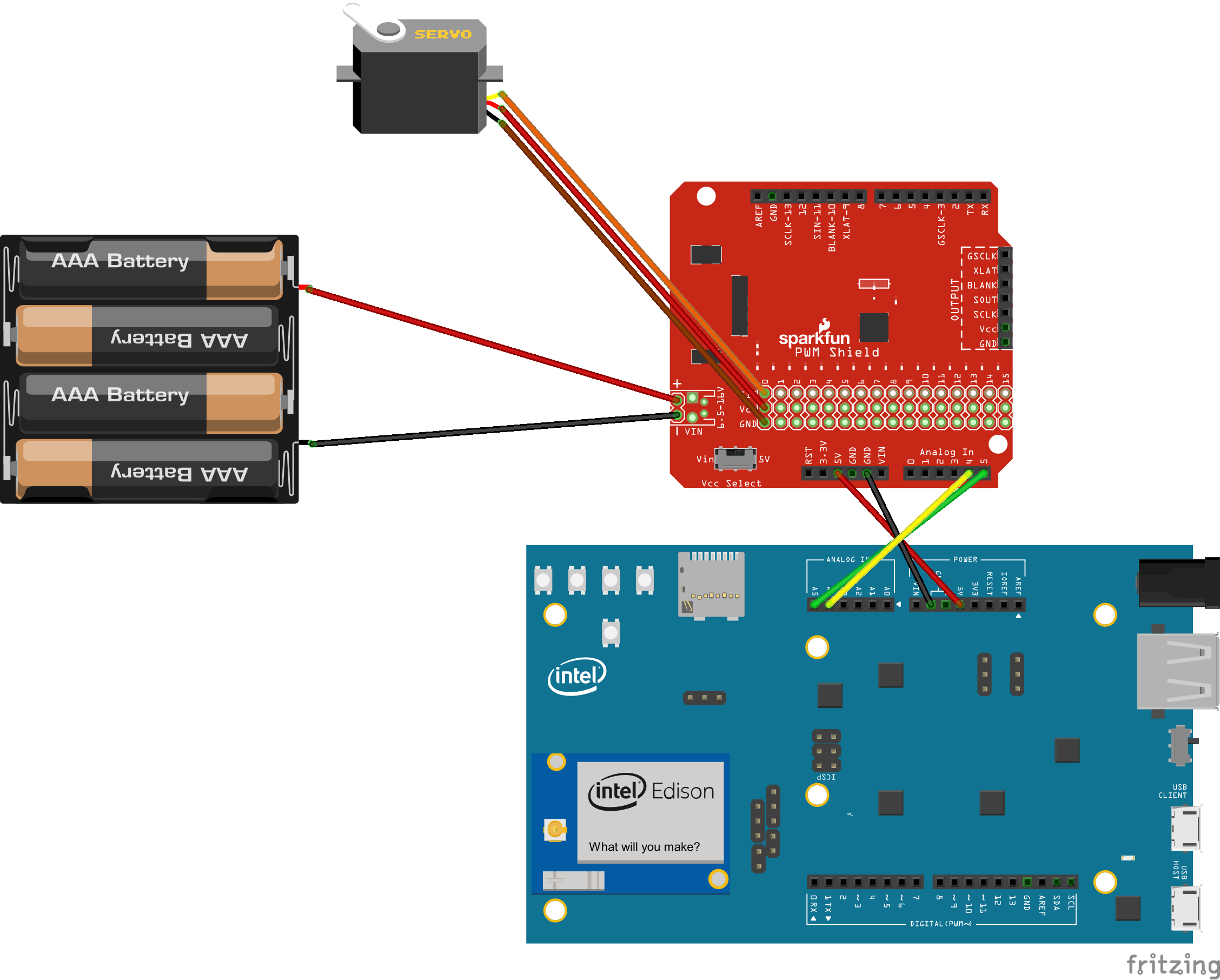
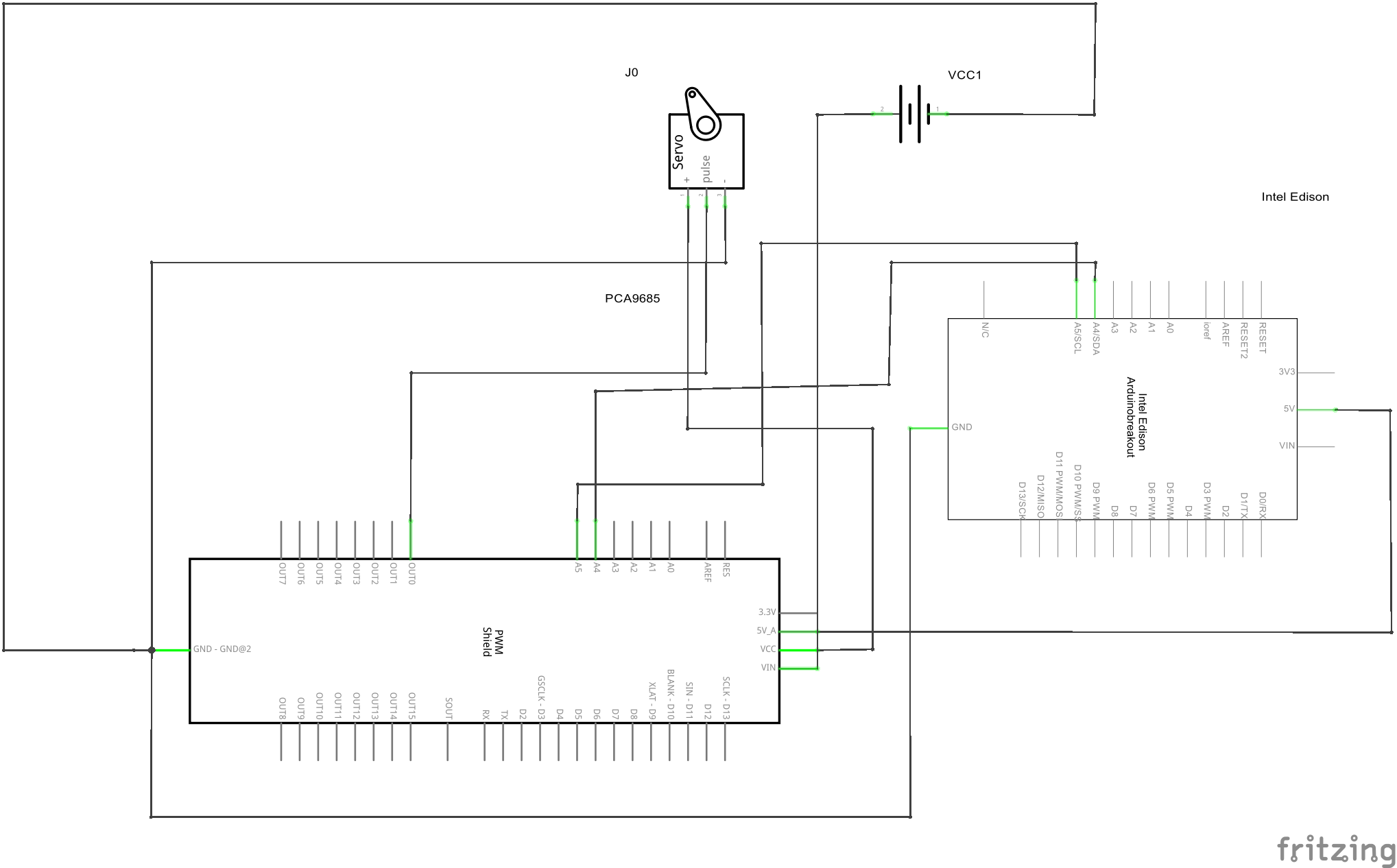
接続図
RTC名
AdafruitPWMServoDriverEdison
DataInPort
| 名称 | データ型 | 説明 |
| in | RTC::TimedDoubleSeq | サーボモータの目標角度 |
コンフィギュレーションパラメータ
| 名称 | 型 | デフォルト値 | 説明 |
| I2C_address | int | 64 | PCA9685のI2Cスレーブアドレス |
| I2C_channel | int | 1 | I2Cポート番号 |
| servo_max | double | 420 | 最大角度の時のパルス幅 x/4096=デューティー比 |
| servo_min | double | 160 | 最少角度の時のパルス幅 x/4096=デューティー比 |
| angle_max | double | 3.141592 | RCサーボの角度範囲 |