Edison偱傾乕儉傪惂屼
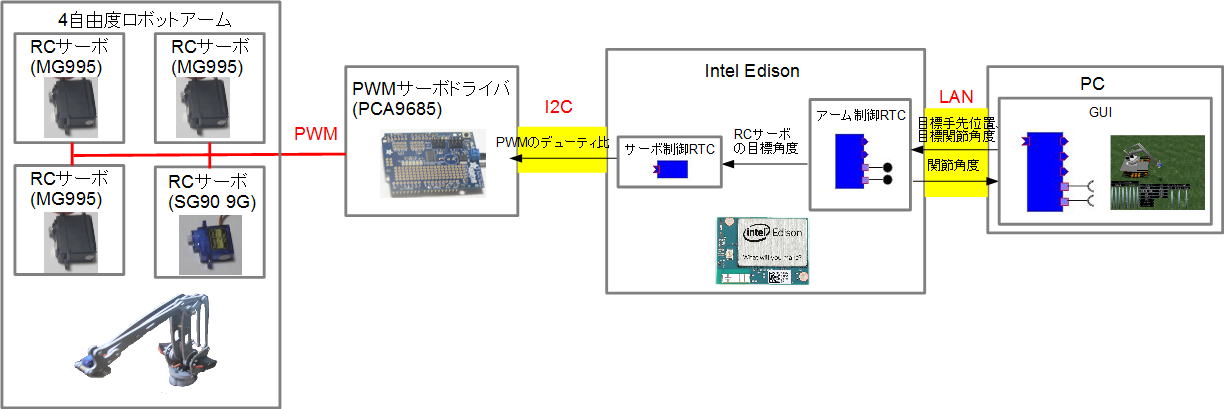
PC偐傜Edison偵柍慄LAN偱捠怣偟丄Edison偵愙懕偟偨PWM僒乕儃僪儔僀僶偐傜傾乕儉傪惂屼偟傑偡丅
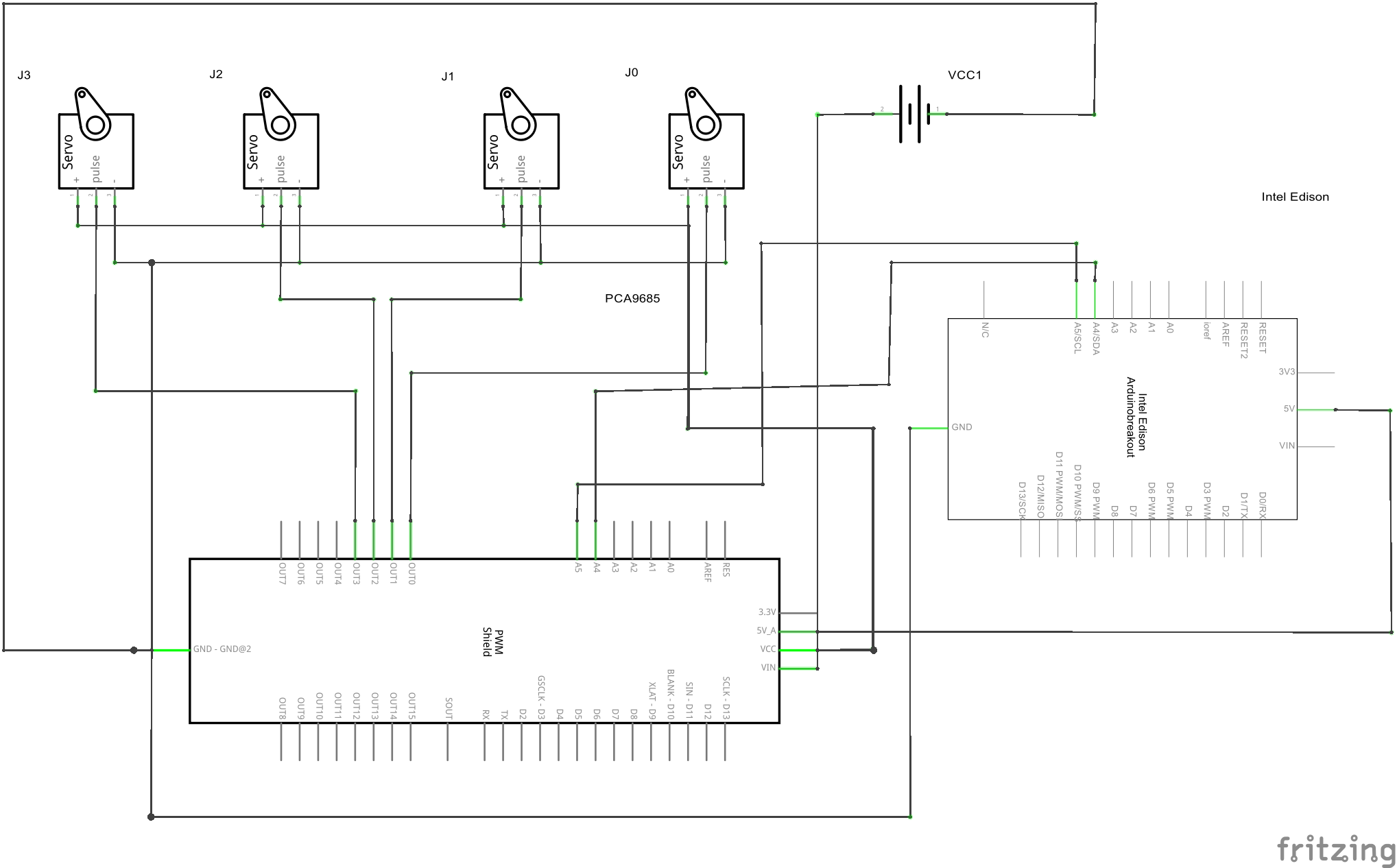
幚婡偺峔惉
Edison偲PC偼柍慄LAN偱捠怣偟傑偡丅
Edison偲PWM僒乕儃僪儔僀僶偼I2C偱捠怣偟傑偡丅
Edison偲PWM僒乕儃僪儔僀僶偺5V丄GND丄A4丄A5傪愙懕偟偰偔偩偝偄丅
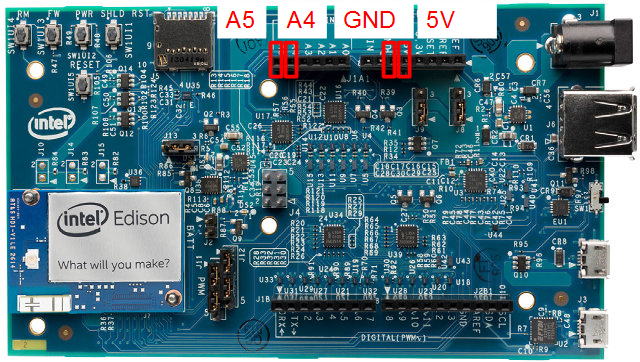
PWM僒乕儃僪儔僀僶偼偝傜偵V+丄GND偵暿揹尮傪愙懕偟偰偔偩偝偄丅Edison偺Arduino婎斦偺5V僺儞傪揹尮偲偟偰巊偆偲Edison偑夡傟傞壜擻惈偑偁傞偺偱昁偢暿揹尮傪梡堄偟偰偔偩偝偄丅
崱夞嶌惉偟偨僔僗僥儉偱偼1.5V偺扨嶰姡揹抮4杮傪RC僒乕儃嬱摦梡揹尮丄Edison偵偼AC傾僟僾僞傪揹尮偵偟偰偄傑偡丅
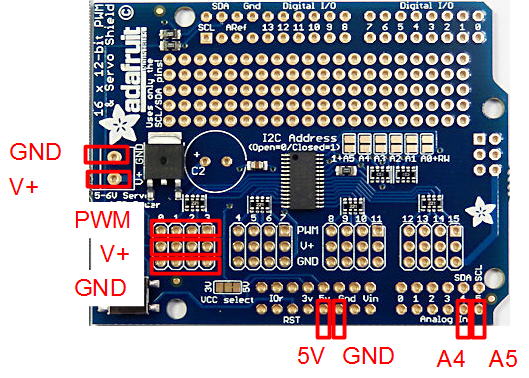
儘儃僢僩傾乕儉偺奺僒乕儃偺儕乕僪慄傪PWM僒乕儃僪儔僀僶偺PWM丄V+丄GND偺奺僺儞偵愙懕偟偰偔偩偝偄丅
| GND | V+ | PWM | |
| MG995 | 拑 | 愒 | 僆儗儞僕 |
| SG90 9G | 崟 | 愒 | 敀 |
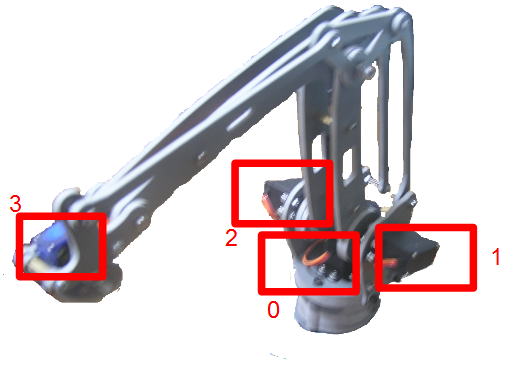
PWM僒乕儃僔乕儖僪偺PWM僺儞偲RC僒乕儃偺怣崋慄偼埲壓偺斣崋弴偵愙懕偟偰偔偩偝偄丅

摦嶌妋擣
幚婡偺峔惉偑廔椆偟偨傜埲壓偺庤弴偱摦嶌妋擣傪峴偭偰偔偩偝偄丅