GUIの仕様
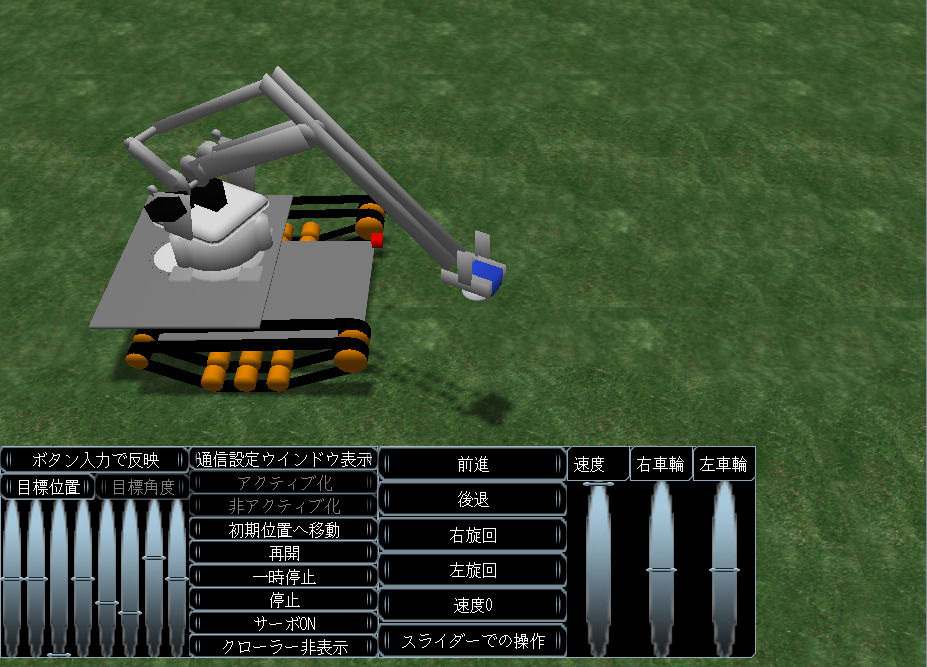
GUIの外観は以下のようになっています。
GUIでアーム、クローラーを操作するとデータポート、サービスポートで他のRTCに通信してアーム、クローラーを操作します。

RTC名
RobotArmCrawlerGUI
DataOutPort
| 名称 | データ型 | 説明 |
| crawlerTarget | RTC::TimedPose2D | クローラーの目標位置、姿勢 |
| crawlerTargetSpeed0 | RTC::TimedDouble | クローラー右モーターへ入力する電圧のPWMデューティー比 |
| crawlerTargetSpeed1 | RTC::TimedDouble | クローラー右モーターへ入力する電圧のPWMデューティー比 |
DataInPort
| 名称 | データ型 | 説明 |
| crawlerPos | RTC::TimedPose2D | クローラーの位置、姿勢 |
サービスポート
ManipulatorCommonInterface_Common
| 名称 | 方向 | IDLファイル | 説明 |
| ManipulatorCommonInterface_Common | Required | ManipulatorCommonInterface_Common.idl | ロボットアーム共通コマンドです。 |
ManipulatorCommonInterface_Middle
| 名称 | 方向 | IDLファイル | 説明 |
| ManipulatorCommonInterface_Middle | Required | ManipulatorCommonInterface_MiddleLevel.idl | ロボットアーム中レベルモーションコマンドです。 |