シミュレーターの使用方法
ここからアーム制御RTC、シミュレーターをダウンロードして解凍してください。
RobotArmSimulatorRTC/ReleaseフォルダのRobotArmSimulatorComp.exeを実行してシミュレータRTCを起動してください。
さらにRobotArmGUI/EXEフォルダのrun_python27.batを実行してGUIを起動してください。
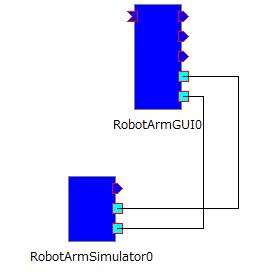
そしてRTシステムエディタでRTCを以下のように接続してください。
RTシステムエディタでアクティブにするとシミュレーションを開始します。
GUIでアームを操作してください。