RTno対応サーボ制御RTCの使用方法
RTnoのインストール
Arduino IDEの1.6系で動作確認したところエラーが出たので1.0系をインストールする必要があるみたいです。
Arduinoのサイトから、
をダウンロードして実行してください。
次にRTnoProxyをインストールします。
このサイトからRTnoProxy.zipをダウンロードして解凍してください。解凍したフォルダのインストーラーを実行してください。
次にこのサイトからRTno-master.zipをダウンロードして解凍してください。
そしてArduino IDEをインストールしたフォルダ(C:/Program Files (x86)/Arduino等)のlibrariesフォルダにRTnoフォルダを作成し、解凍したフォルダの中身をコピーします。
サーボ制御RTCのインストール
ここから全部入りセットをダウンロードして解凍してください。
ServoControllerRTnoフォルダのServoControllerRTno.inoを開いてください。
そしてArduinoをPCに接続して、ServoControllerRTno.inoをマイコンボードを書き込んでください。
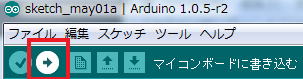
以下のボタンを押下する事で書き込めます。
動作確認
RobotArmController/Releaseフォルダのarmcontrollercomp.exeを実行してアーム制御RTC、RobotArmGUI/EXEに移動後、run_python27.batを起動してください。
次にRTnoをインストールしたフォルダ(C:\Program Files (x86)\SugarSweetRobotics\RTnoProxy等)のRTnoProxy.confを編集します。
Arduinoを接続しているシリアルポートを確認後、コンフィギュレーションパラメータcomportをシリアルポート名に変更します。
conf.default.comport:\\\\.\\COM4 #conf.default.comport:/dev/ttyACM0 #conf.default.comport:/dev/cu.usbmodem1411
そしてRTシステムエディタ上で以下のようにRTCを接続します。
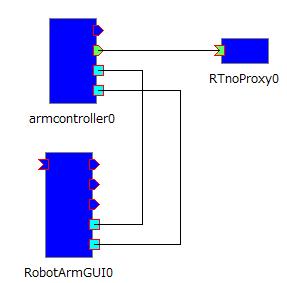
後はRTCをアクティブにしてGUIを操作すればロボットアームを制御できます。